Project Overview
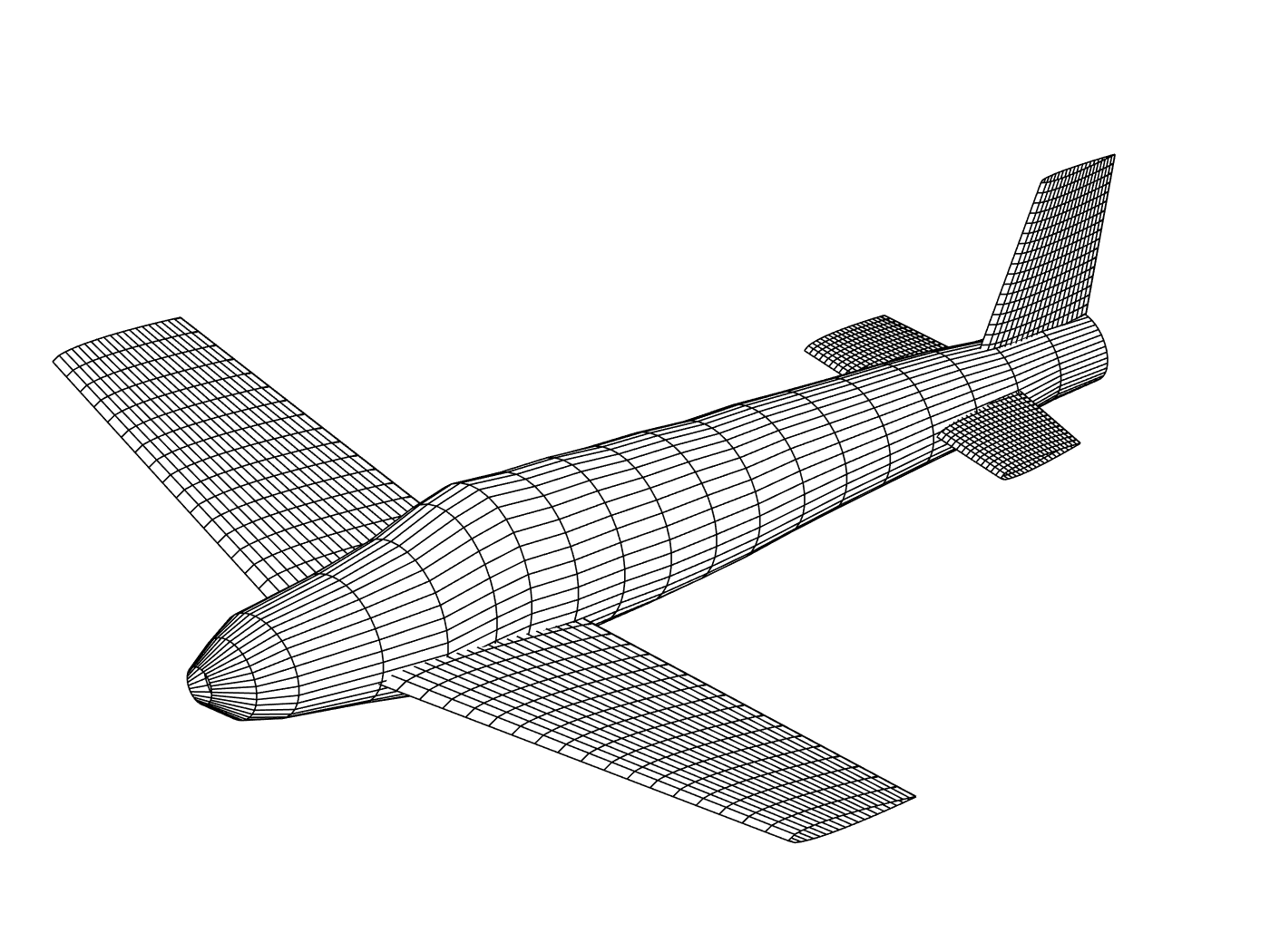
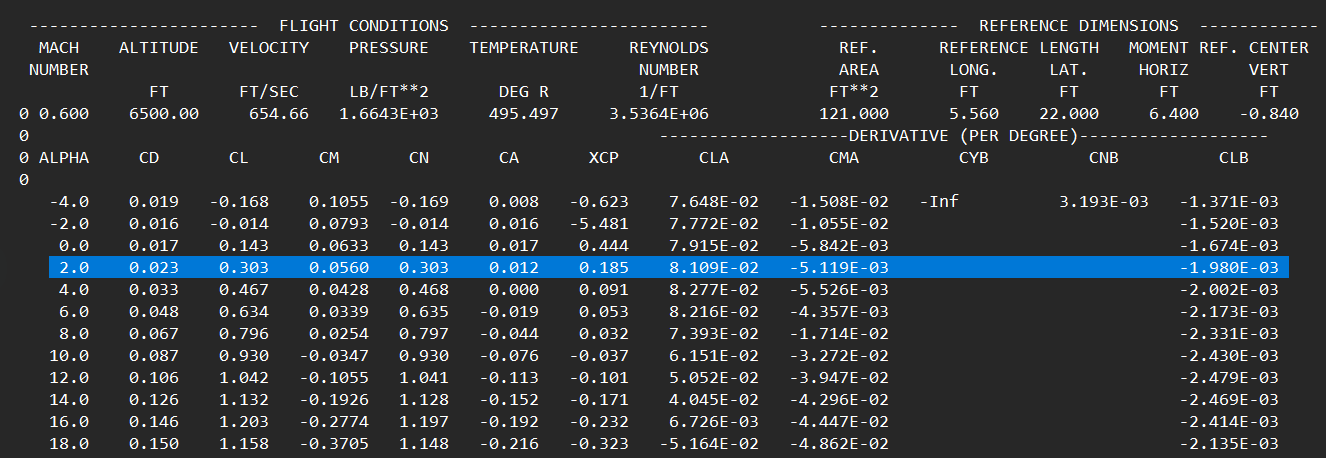
This project covered the full cycle of aircraft stability and control analysis — from geometry sizing and hand-derived stability derivatives all the way through closed-loop simulation and 3D flight visualization. The aircraft was a clean-sheet design, sized to fly at Mach 0.6 and 6,500 ft altitude at a trimmed angle of attack of 2°, carrying two passengers at a gross weight of 4,000 lb. The goal was to demonstrate that a designed configuration could simultaneously satisfy aerodynamic, geometric, and stability requirements, and then validate that behavior computationally.
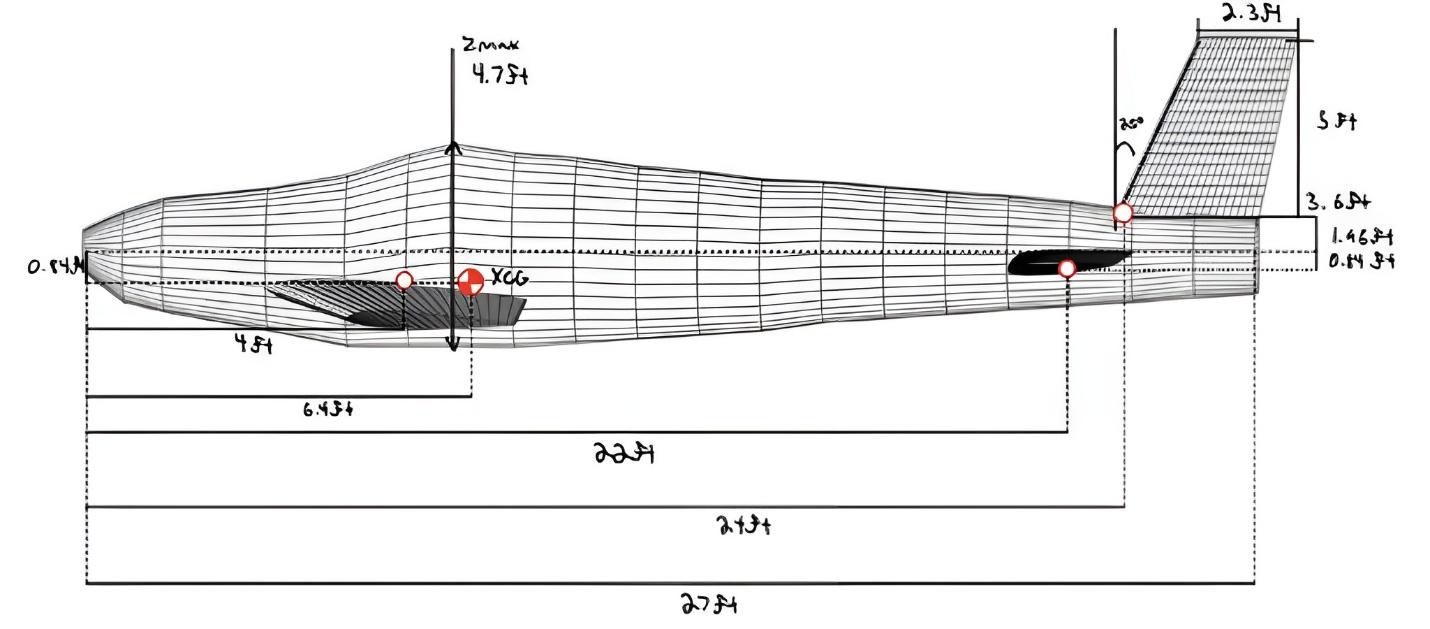
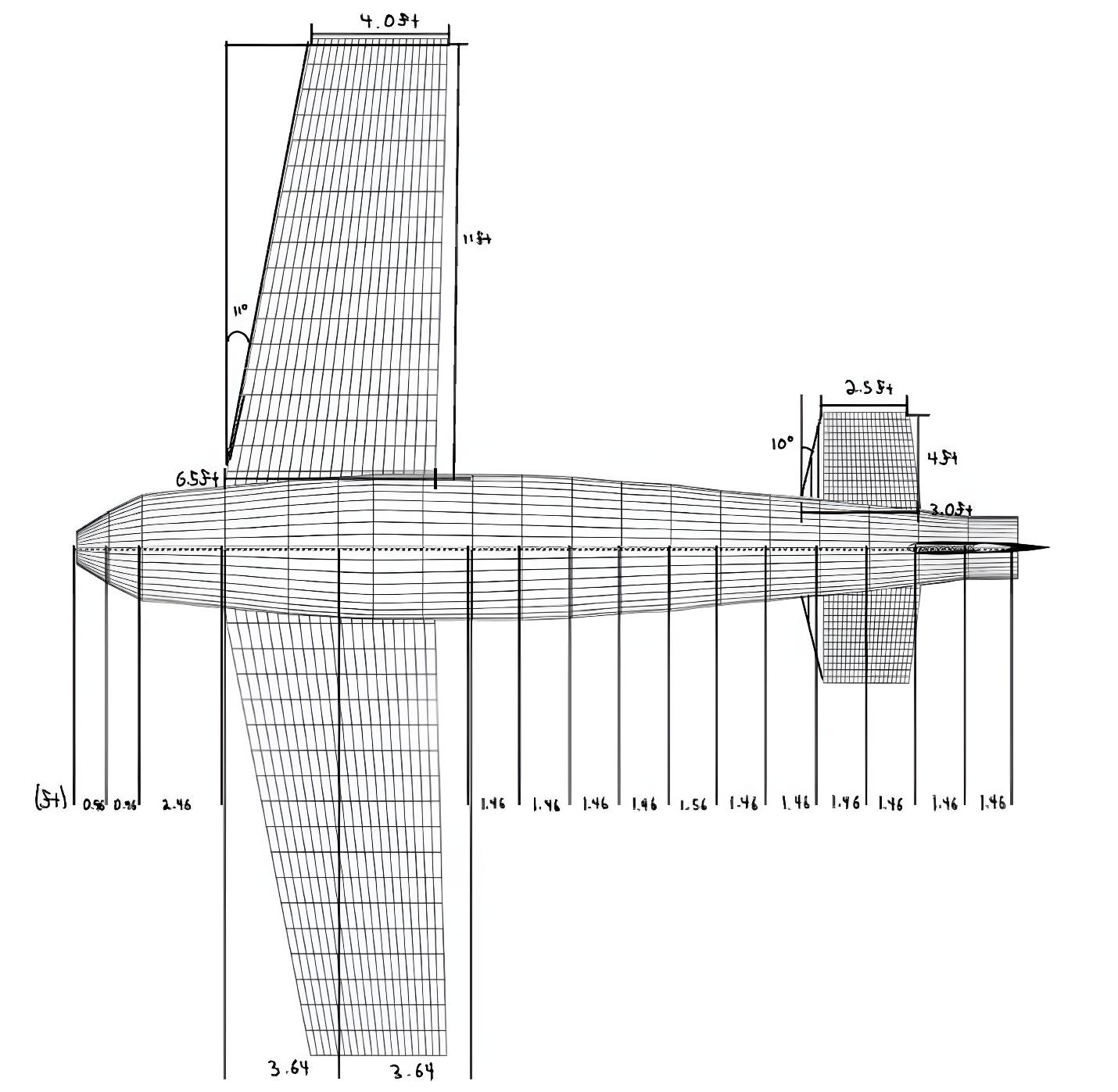
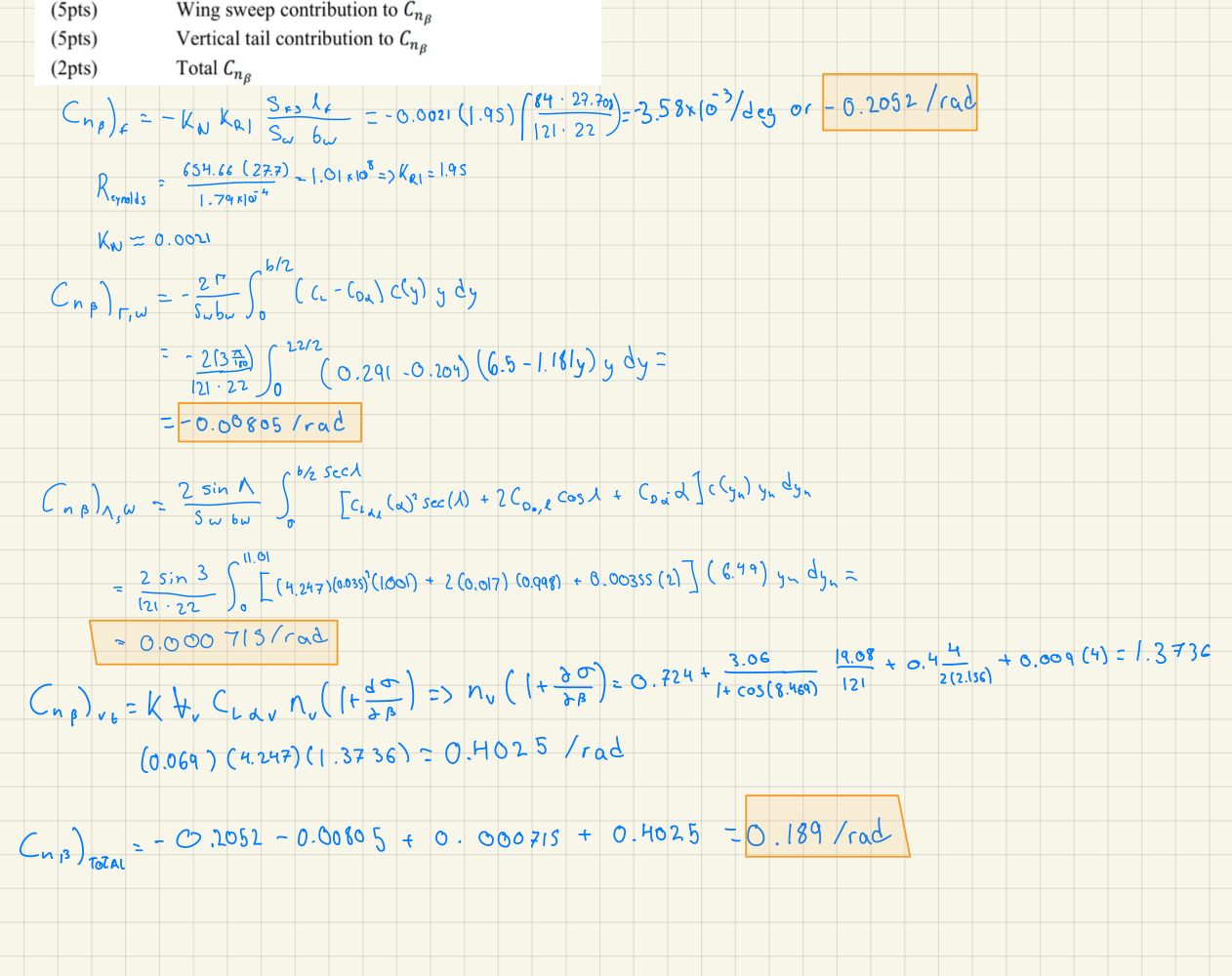
- Define aircraft geometry (wing, horizontal tail, vertical tail, fuselage) to satisfy required CLα, CD0, Cmα, and Cnβ targets
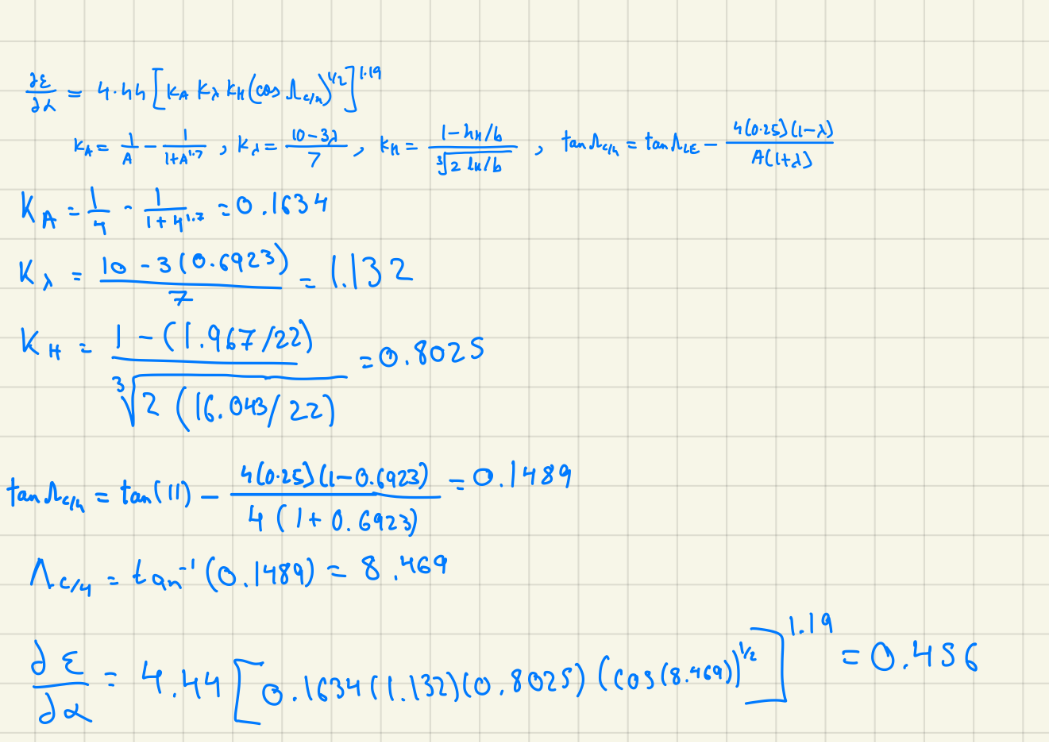
- Compute key stability derivatives analytically and cross-validate with USAF DATCOM across multiple flight conditions and angles of attack
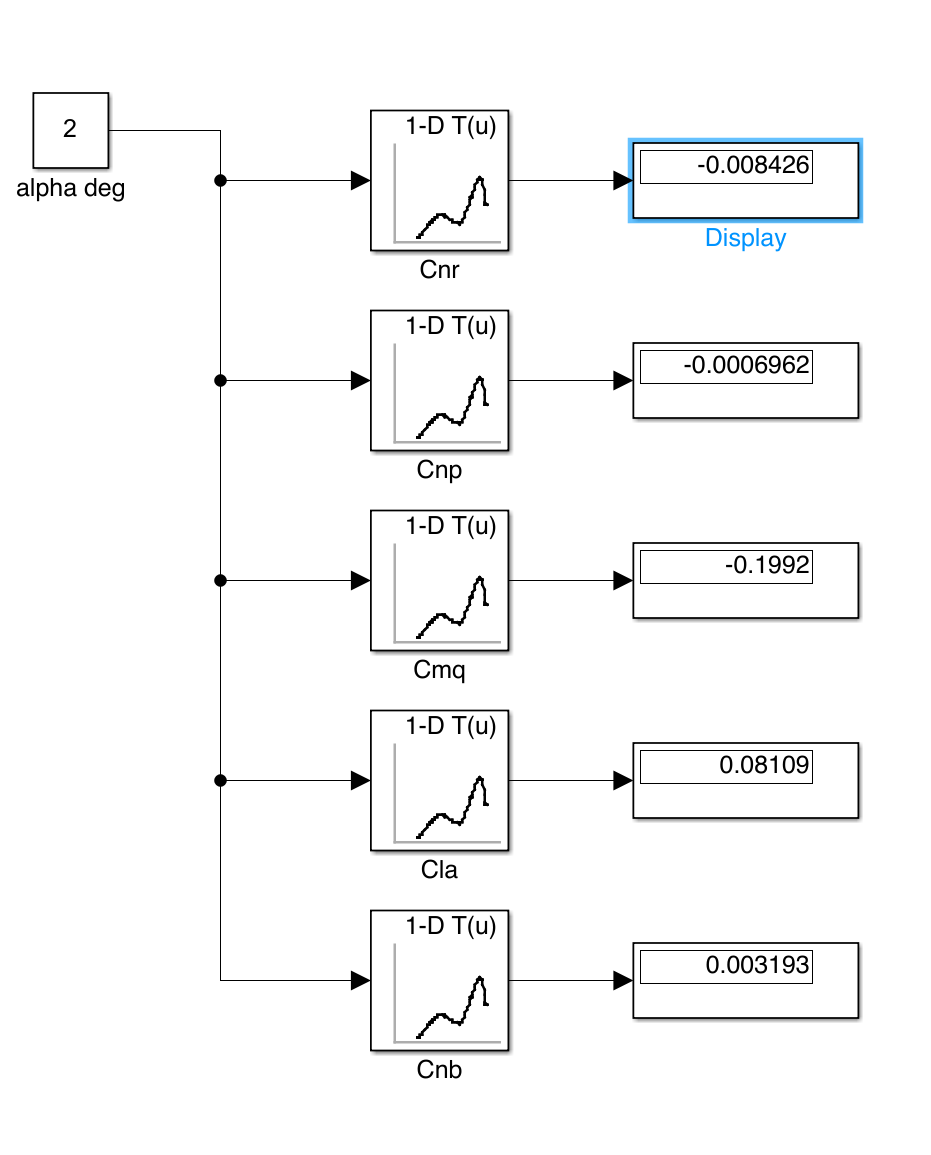
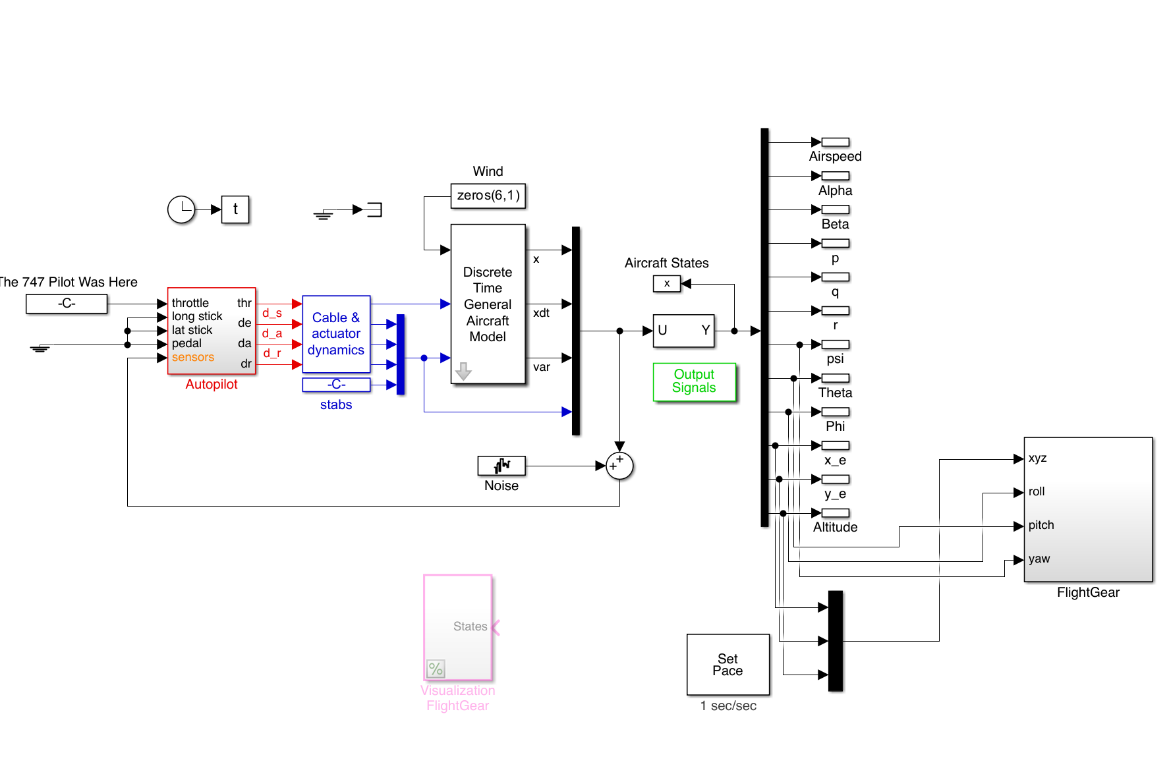
- Integrate five dynamic derivatives (Cnr, Cnp, Cmq, Clα, Cnb) as lookup-table blocks in a Simulink 6-DOF general aviation model
- Visualize level flight, pitch-up, and right-bank maneuvers through the FlightGear flight simulator interface